機器人系統集成是以工業機器人為核心單元,結合先進的焊接設備、先進的焊接工藝技術以及系統工程技術,以其應用范圍廣泛、工藝靈活多樣、加工產品精度高、質量穩定、自動化程度高、柔性化和智能化等諸多優點,正越來越被各行業廣泛使用,成為現代焊接業的重要組成部分。

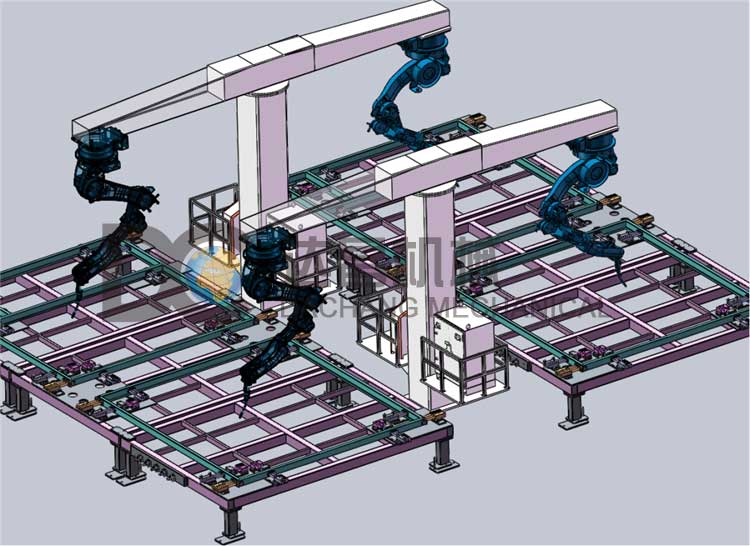
我司設計的集裝箱焊接吊臂機器人,采用懸臂增加焊接機器人的行程,可用于多種鋼結構集裝箱焊接工作。
1、方案簡述
為了提高工作效率,根據客戶工件的實際情況,我方向客戶公司提供1套機器人焊接工作站,該工作站是由二臺卡諾普CRP-RH20-10-W型焊接機器人、焊接電源、機器人專用焊槍、電氣控制及按鈕站、安全防護圍欄(選配)等部分組成。
2、焊接工件描述
焊絲規格: Ф1.2mm
焊接工藝: 氣保焊
焊縫形式: 直線型,圓弧形
工作方式: 人工上下料,機器人自動焊接
組對間隙: ≤1mm 焊前清理: 焊縫及兩側兩倍焊縫高度范圍內可見金屬光
3、工作流程
1.操作人員將工件放置在工位一上,按下預約啟動按鈕后,機器人開始焊接作業。
2.操作人員將工件放置在工位二上,按下預約啟動按鈕,等待機器人焊接。
3.機器人完成工位一焊接后,自動開始焊接工位二。
4.操作人員到工位一卸下焊接成品,并繼續裝夾工件。
5.以此循環






")
")
